一些基本数学公式
绝对值/最大值/最小值
#define Abs(A) ((A>=0)?A:-A) // 绝对值函数
#define Min(A,B) ((A<=B)?A:B) // 求最小函数
#define Max(A,B) ((A>=B)?A:B) // 求最大函数固定点格式IQ15
#define _IQ15(A) (int32_t)((A)<<15) //左移15位 32768
#define _IQ(A) _IQ15(A) //定义IQ格式 32768
#define _IQmpy(A,B) (int32_t)((A*B)>>15) //IQ格式相乘
#define _IQ10mpy(A,B) (int32_t)((A*B)>>10) //IQ10格式相乘
#define _IQdiv2(A) (int32_t)((A)>>1) //除2
#define _IQmpy2(A) (int32_t)(A<<1) //乘2
#define _IQdiv(A,B) (int32_t)((A<<15)/B) //IQ格式相除正弦与余弦函数查找表
查找表(lookup table)用于存储正弦和余弦函数的值.
预先计算好的正弦或余弦函数在一定范围内的离散采样值
const int16_t IQSin_Cos_Table[256]={\
0x0000,0x00C9,0x0192,0x025B,0x0324,0x03ED,0x04B6,0x057F,\
0x0648,0x0711,0x07D9,0x08A2,0x096A,0x0A33,0x0AFB,0x0BC4,\
0x0C8C,0x0D54,0x0E1C,0x0EE3,0x0FAB,0x1072,0x113A,0x1201,\
0x12C8,0x138F,0x1455,0x151C,0x15E2,0x16A8,0x176E,0x1833,\
0x18F9,0x19BE,0x1A82,0x1B47,0x1C0B,0x1CCF,0x1D93,0x1E57,\
0x1F1A,0x1FDD,0x209F,0x2161,0x2223,0x22E5,0x23A6,0x2467,\
0x2528,0x25E8,0x26A8,0x2767,0x2826,0x28E5,0x29A3,0x2A61,\
0x2B1F,0x2BDC,0x2C99,0x2D55,0x2E11,0x2ECC,0x2F87,0x3041,\
0x30FB,0x31B5,0x326E,0x3326,0x33DF,0x3496,0x354D,0x3604,\
0x36BA,0x376F,0x3824,0x38D9,0x398C,0x3A40,0x3AF2,0x3BA5,\
0x3C56,0x3D07,0x3DB8,0x3E68,0x3F17,0x3FC5,0x4073,0x4121,\
0x41CE,0x427A,0x4325,0x43D0,0x447A,0x4524,0x45CD,0x4675,\
0x471C,0x47C3,0x4869,0x490F,0x49B4,0x4A58,0x4AFB,0x4B9D,\
0x4C3F,0x4CE0,0x4D81,0x4E20,0x4EBF,0x4F5D,0x4FFB,0x5097,\
0x5133,0x51CE,0x5268,0x5302,0x539B,0x5432,0x54C9,0x5560,\
0x55F5,0x568A,0x571D,0x57B0,0x5842,0x58D3,0x5964,0x59F3,\
0x5A82,0x5B0F,0x5B9C,0x5C28,0x5CB3,0x5D3E,0x5DC7,0x5E4F,\
0x5ED7,0x5F5D,0x5FE3,0x6068,0x60EB,0x616E,0x61F0,0x6271,\
0x62F1,0x6370,0x63EE,0x646C,0x64E8,0x6563,0x65DD,0x6656,\
0x66CF,0x6746,0x67BC,0x6832,0x68A6,0x6919,0x698B,0x69FD,\
0x6A6D,0x6ADC,0x6B4A,0x6BB7,0x6C23,0x6C8E,0x6CF8,0x6D61,\
0x6DC9,0x6E30,0x6E96,0x6EFB,0x6F5E,0x6FC1,0x7022,0x7083,\
0x70E2,0x7140,0x719D,0x71F9,0x7254,0x72AE,0x7307,0x735E,\
0x73B5,0x740A,0x745F,0x74B2,0x7504,0x7555,0x75A5,0x75F3,\
0x7641,0x768D,0x76D8,0x7722,0x776B,0x77B3,0x77FA,0x783F,\
0x7884,0x78C7,0x7909,0x794A,0x7989,0x79C8,0x7A05,0x7A41,\
0x7A7C,0x7AB6,0x7AEE,0x7B26,0x7B5C,0x7B91,0x7BC5,0x7BF8,\
0x7C29,0x7C59,0x7C88,0x7CB6,0x7CE3,0x7D0E,0x7D39,0x7D62,\
0x7D89,0x7DB0,0x7DD5,0x7DFA,0x7E1D,0x7E3E,0x7E5F,0x7E7E,\
0x7E9C,0x7EB9,0x7ED5,0x7EEF,0x7F09,0x7F21,0x7F37,0x7F4D,\
0x7F61,0x7F74,0x7F86,0x7F97,0x7FA6,0x7FB4,0x7FC1,0x7FCD,\
0x7FD8,0x7FE1,0x7FE9,0x7FF0,0x7FF5,0x7FF9,0x7FFD,0x7FFE};反正切函数查找表
const int32_t IQAtan2_Table[256]={\
0x00000000,0x000000C9,0x00000192,0x0000025B,0x00000324,0x000003ED,0x000004B6,0x00000580,\
0x00000649,0x00000712,0x000008A7,0x00000971,0x00000A3B,0x00000B05,0x00000BD0,0x00000C9B,\
0x00000D66,0x00000E31,0x00000EFD,0x00000FC9,0x00001095,0x00001162,0x00001218,0x0000122F,\
0x000012FC,0x000013CA,0x00001498,0x00001566,0x00001635,0x00001705,0x000017D4,0x000018A5,\
0x00001975,0x00001A47,0x00001B19,0x00001BEB,0x00001CBE,0x00001D91,0x00001E65,0x00001F3A,\
0x0000200F,0x000020E5,0x000021BC,0x00002294,0x0000236C,0x00002444,0x0000251E,0x000025F8,\
0x000026D4,0x000027B0,0x0000288C,0x0000296A,0x00002A49,0x00002B28,0x00002C08,0x00002CEA,\
0x00002DCC,0x00002EAF,0x00002F94,0x00003079,0x00003160,0x00003247,0x00003330,0x00003419,\
0x00003509,0x00003571,0x000036DE,0x000037CD,0x000038BD,0x000039AE,0x00003AA0,0x00003B94,\
0x00003C8A,0x00003D80,0x00003E79,0x00003F72,0x0000406E,0x0000416A,0x00004269,0x00004369,\
0x0000446A,0x0000456E,0x00004673,0x0000477A,0x00004882,0x0000498D,0x00004A99,0x00004BA8,\
0x00004CB8,0x00004DCA,0x00004EDF,0x00004FF5,0x0000510E,0x00005228,0x00005345,0x00005465,\
0x00005586,0x000056AA,0x000057D1,0x000058FA,0x00005A25,0x00005B53,0x00005C84,0x00005DB8,\
0x00005EEE,0x00006027,0x00006163,0x000062A2,0x000063E4,0x00006529,0x00006671,0x000067BD,\
0x0000690C,0x00006A5E,0x00006BB3,0x00006D0D,0x00006E69,0x00006FCA,0x0000712E,0x00007296,\
0x00007403,0x00007573,0x000076E7,0x00007860,0x000079DD,0x00007B5F,0x00007CE5,0x00007E70,\
0x00008000,0x00008194,0x0000832E,0x000084CD,0x00008671,0x0000881A,0x000089CA,0x00008B7F,\
0x00008D39,0x00008EFA,0x000090C1,0x0000928F,0x00009463,0x0000963D,0x0000981F,0x00009A08,\
0x00009BF7,0x00009DEF,0x00009FEE,0x0000A1F5,0x0000A404,0x0000A61B,0x0000A83B,0x0000AA64,\
0x0000AC96,0x0000AED1,0x0000B116,0x0000B365,0x0000B5BE,0x0000B822,0x0000BA91,0x0000BD0B,\
0x0000BF90,0x0000C222,0x0000C4C0,0x0000C76A,0x0000CA22,0x0000CCE7,0x0000CF88,0x0000D29D,\
0x0000D58E,0x0000D88E,0x0000DB9F,0x0000DEC0,0x0000E1F3,0x0000E538,0x0000E88F,0x0000EBFA,\
0x0000EF78,0x0000F30B,0x0000F6B4,0x0000FA74,0x0000FE4A,0x00010239,0x00010641,0x00010A64,\
0x00010EA2,0x000112FC,0x00011774,0x00011C0B,0x00012C03,0x0001259C,0x00012A99,0x00012FBC,\
0x00013504,0x00013A76,0x00014012,0x000145DB,0x00014BD3,0x000151FD,0x0001585A,0x00015EEE,\
0x000165BC,0x00016CC6,0x00017411,0x00017B9F,0x00018376,0x00018B98,0x0001940A,0x00019CD2,\
0x0001A5F5,0x0001AF78,0x0001B963,0x0001C3BB,0x0001CE88,0x0001D9D2,0x0001E5A3,0x0001F205,\
0x0001FF01,0x00020CA4,0x00021AFB,0x00022A15,0x00023A02,0x00024AD4,0x00025C9F,0x00026F7B,\
0x0002837F,0x000298CA,0x0002AF7C,0x0002C7BA,0x0002E1AE,0x0002FD8A,0x00031B84,0x00033BDF,\
0x00035EE7,0x000384F5,0x0003AE73,0x0003DBDD,0x00040DCB,0x000444F4,0x00048236,0x0004C6A6,\
0x0005139B,0x00056AC9,0x0005CE63,0x00064144,0x0006C740,0x0007658D,0x00082374,0x00090B81,\
0x000A2D7F,0x000BA246,0x000D9338,0x00104AD7,0x00145E24,0x001B28CC,0x0028BDDA,0x00517C7E };计算正余弦
实现了根据输入角度值计算正弦和余弦值的功能
void IQSin_Cos_Cale(p_IQSin_Cos pV)
{
uint16_t hindex;
hindex = (uint16_t) pV->IQAngle; //-32768--- 32767 +32768===0--65535
hindex >>=6; //65536/64 ===1024/4=90度=256 0x01-0xFF 0X100 0X1FF 0X200 0X2FF 0X300 0X3FF
switch (hindex & SIN_RAD) // 0X300 & 0x0000 -ff 0x0100 1ff 0X200 2ff 0x0300 3ff
{
case U0_90:
pV->IQSin = IQSin_Cos_Table[(uint8_t)(hindex)]; // 0---255 ==0---32766
pV->IQCos = IQSin_Cos_Table[(uint8_t)(0xFF-(u8)(hindex))];
break;
case U90_180:
pV->IQSin = IQSin_Cos_Table[(u8)(0xFF-(u8)(hindex))]; // 255---0 == 0---32766
pV->IQCos = -IQSin_Cos_Table[(u8)(hindex)];
break;
case U180_270:
pV->IQSin = -IQSin_Cos_Table[(u8)(hindex)];
pV->IQCos = -IQSin_Cos_Table[(u8)(0xFF-(u8)(hindex))];
break;
case U270_360:
pV->IQSin= -IQSin_Cos_Table[(u8)(0xFF-(u8)(hindex))];
pV->IQCos = IQSin_Cos_Table[(u8)(hindex)];
break;
default:
break;
}
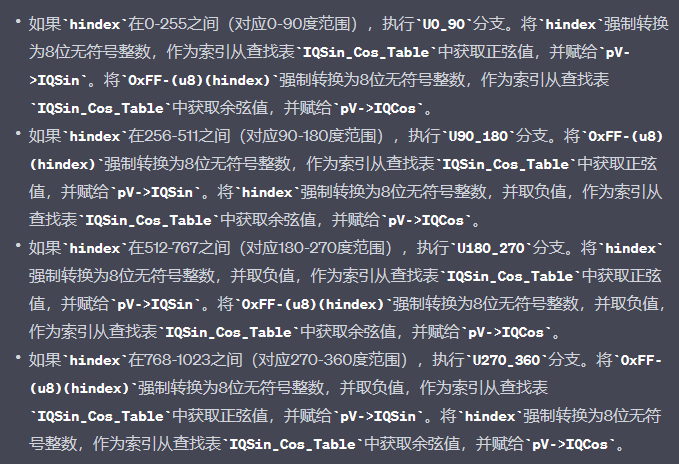
} 首先,将输入角度值pV->IQAngle转换为无符号16位整数hindex。然后,对hindex进行右移6位,相当于将取值范围从0-65535缩小到0-1023,每64个值对应90度(256个值)。
接下来,通过对hindex与SIN_RAD进行按位与操作,将角度范围分为四个区间进行处理。
计算反正切值
void IQAtan_Cale(p_IQAtan pV)
{
int16_t i=0;
if( pV->Alpha == 0)
{
if (pV->Beta==0)
i =0;
else
i =255;
}
else
{
pV->IQTan = _IQdiv(Abs(pV->Beta),Abs(pV->Alpha));
if (IQAtan2_Table[i + 128] <= pV->IQTan) i += 128;
if (IQAtan2_Table[i + 64] <= pV->IQTan) i += 64;
if (IQAtan2_Table[i + 32] <= pV->IQTan) i += 32;
if (IQAtan2_Table[i + 16] <= pV->IQTan) i += 16;
if (IQAtan2_Table[i + 8] <= pV->IQTan) i += 8;
if (IQAtan2_Table[i + 4] <= pV->IQTan) i += 4;
if (IQAtan2_Table[i + 2] <= pV->IQTan) i += 2;
if (IQAtan2_Table[i + 1] <= pV->IQTan) i += 1;
}
if ( pV->Beta> 0)
{
if (pV->Alpha >0)
pV->IQAngle =i ;
else
pV->IQAngle= 512 -i;
}
else
{
if ( pV->Alpha >0)
pV->IQAngle= 1024-i;
else
pV->IQAngle =i+512;
}
if( pV->IQAngle<0)
pV->IQAngle+=1024;
pV->IQAngle= pV->IQAngle<<6;
}用于计算输入值的平方根并返回结果
一种近似算法
uint32_t IQSqrt(uint32_t M)
{
uint32_t N, i ,tmp ,ttp;
if ( M==0 )
return 0;
N=0;
tmp=(M>>30);
M<<=2;
if( tmp>1 )
{
N++;
tmp-=N;
}
for (i=15;i>0;i-- )
{
N<<=1;
tmp<<=2;
tmp+=(M>>30);
ttp=N;
ttp=(ttp<<1)+1;
M<<=2;
if( tmp>= ttp )
{
tmp-=ttp;
N++;
}
}
return N;
}代码
IQ_math.c
#include "IQ_math.h"
const int16_t IQSin_Cos_Table[256]={\
0x0000,0x00C9,0x0192,0x025B,0x0324,0x03ED,0x04B6,0x057F,\
0x0648,0x0711,0x07D9,0x08A2,0x096A,0x0A33,0x0AFB,0x0BC4,\
0x0C8C,0x0D54,0x0E1C,0x0EE3,0x0FAB,0x1072,0x113A,0x1201,\
0x12C8,0x138F,0x1455,0x151C,0x15E2,0x16A8,0x176E,0x1833,\
0x18F9,0x19BE,0x1A82,0x1B47,0x1C0B,0x1CCF,0x1D93,0x1E57,\
0x1F1A,0x1FDD,0x209F,0x2161,0x2223,0x22E5,0x23A6,0x2467,\
0x2528,0x25E8,0x26A8,0x2767,0x2826,0x28E5,0x29A3,0x2A61,\
0x2B1F,0x2BDC,0x2C99,0x2D55,0x2E11,0x2ECC,0x2F87,0x3041,\
0x30FB,0x31B5,0x326E,0x3326,0x33DF,0x3496,0x354D,0x3604,\
0x36BA,0x376F,0x3824,0x38D9,0x398C,0x3A40,0x3AF2,0x3BA5,\
0x3C56,0x3D07,0x3DB8,0x3E68,0x3F17,0x3FC5,0x4073,0x4121,\
0x41CE,0x427A,0x4325,0x43D0,0x447A,0x4524,0x45CD,0x4675,\
0x471C,0x47C3,0x4869,0x490F,0x49B4,0x4A58,0x4AFB,0x4B9D,\
0x4C3F,0x4CE0,0x4D81,0x4E20,0x4EBF,0x4F5D,0x4FFB,0x5097,\
0x5133,0x51CE,0x5268,0x5302,0x539B,0x5432,0x54C9,0x5560,\
0x55F5,0x568A,0x571D,0x57B0,0x5842,0x58D3,0x5964,0x59F3,\
0x5A82,0x5B0F,0x5B9C,0x5C28,0x5CB3,0x5D3E,0x5DC7,0x5E4F,\
0x5ED7,0x5F5D,0x5FE3,0x6068,0x60EB,0x616E,0x61F0,0x6271,\
0x62F1,0x6370,0x63EE,0x646C,0x64E8,0x6563,0x65DD,0x6656,\
0x66CF,0x6746,0x67BC,0x6832,0x68A6,0x6919,0x698B,0x69FD,\
0x6A6D,0x6ADC,0x6B4A,0x6BB7,0x6C23,0x6C8E,0x6CF8,0x6D61,\
0x6DC9,0x6E30,0x6E96,0x6EFB,0x6F5E,0x6FC1,0x7022,0x7083,\
0x70E2,0x7140,0x719D,0x71F9,0x7254,0x72AE,0x7307,0x735E,\
0x73B5,0x740A,0x745F,0x74B2,0x7504,0x7555,0x75A5,0x75F3,\
0x7641,0x768D,0x76D8,0x7722,0x776B,0x77B3,0x77FA,0x783F,\
0x7884,0x78C7,0x7909,0x794A,0x7989,0x79C8,0x7A05,0x7A41,\
0x7A7C,0x7AB6,0x7AEE,0x7B26,0x7B5C,0x7B91,0x7BC5,0x7BF8,\
0x7C29,0x7C59,0x7C88,0x7CB6,0x7CE3,0x7D0E,0x7D39,0x7D62,\
0x7D89,0x7DB0,0x7DD5,0x7DFA,0x7E1D,0x7E3E,0x7E5F,0x7E7E,\
0x7E9C,0x7EB9,0x7ED5,0x7EEF,0x7F09,0x7F21,0x7F37,0x7F4D,\
0x7F61,0x7F74,0x7F86,0x7F97,0x7FA6,0x7FB4,0x7FC1,0x7FCD,\
0x7FD8,0x7FE1,0x7FE9,0x7FF0,0x7FF5,0x7FF9,0x7FFD,0x7FFE};
const int32_t IQAtan2_Table[256]={\
0x00000000,0x000000C9,0x00000192,0x0000025B,0x00000324,0x000003ED,0x000004B6,0x00000580,\
0x00000649,0x00000712,0x000008A7,0x00000971,0x00000A3B,0x00000B05,0x00000BD0,0x00000C9B,\
0x00000D66,0x00000E31,0x00000EFD,0x00000FC9,0x00001095,0x00001162,0x00001218,0x0000122F,\
0x000012FC,0x000013CA,0x00001498,0x00001566,0x00001635,0x00001705,0x000017D4,0x000018A5,\
0x00001975,0x00001A47,0x00001B19,0x00001BEB,0x00001CBE,0x00001D91,0x00001E65,0x00001F3A,\
0x0000200F,0x000020E5,0x000021BC,0x00002294,0x0000236C,0x00002444,0x0000251E,0x000025F8,\
0x000026D4,0x000027B0,0x0000288C,0x0000296A,0x00002A49,0x00002B28,0x00002C08,0x00002CEA,\
0x00002DCC,0x00002EAF,0x00002F94,0x00003079,0x00003160,0x00003247,0x00003330,0x00003419,\
0x00003509,0x00003571,0x000036DE,0x000037CD,0x000038BD,0x000039AE,0x00003AA0,0x00003B94,\
0x00003C8A,0x00003D80,0x00003E79,0x00003F72,0x0000406E,0x0000416A,0x00004269,0x00004369,\
0x0000446A,0x0000456E,0x00004673,0x0000477A,0x00004882,0x0000498D,0x00004A99,0x00004BA8,\
0x00004CB8,0x00004DCA,0x00004EDF,0x00004FF5,0x0000510E,0x00005228,0x00005345,0x00005465,\
0x00005586,0x000056AA,0x000057D1,0x000058FA,0x00005A25,0x00005B53,0x00005C84,0x00005DB8,\
0x00005EEE,0x00006027,0x00006163,0x000062A2,0x000063E4,0x00006529,0x00006671,0x000067BD,\
0x0000690C,0x00006A5E,0x00006BB3,0x00006D0D,0x00006E69,0x00006FCA,0x0000712E,0x00007296,\
0x00007403,0x00007573,0x000076E7,0x00007860,0x000079DD,0x00007B5F,0x00007CE5,0x00007E70,\
0x00008000,0x00008194,0x0000832E,0x000084CD,0x00008671,0x0000881A,0x000089CA,0x00008B7F,\
0x00008D39,0x00008EFA,0x000090C1,0x0000928F,0x00009463,0x0000963D,0x0000981F,0x00009A08,\
0x00009BF7,0x00009DEF,0x00009FEE,0x0000A1F5,0x0000A404,0x0000A61B,0x0000A83B,0x0000AA64,\
0x0000AC96,0x0000AED1,0x0000B116,0x0000B365,0x0000B5BE,0x0000B822,0x0000BA91,0x0000BD0B,\
0x0000BF90,0x0000C222,0x0000C4C0,0x0000C76A,0x0000CA22,0x0000CCE7,0x0000CF88,0x0000D29D,\
0x0000D58E,0x0000D88E,0x0000DB9F,0x0000DEC0,0x0000E1F3,0x0000E538,0x0000E88F,0x0000EBFA,\
0x0000EF78,0x0000F30B,0x0000F6B4,0x0000FA74,0x0000FE4A,0x00010239,0x00010641,0x00010A64,\
0x00010EA2,0x000112FC,0x00011774,0x00011C0B,0x00012C03,0x0001259C,0x00012A99,0x00012FBC,\
0x00013504,0x00013A76,0x00014012,0x000145DB,0x00014BD3,0x000151FD,0x0001585A,0x00015EEE,\
0x000165BC,0x00016CC6,0x00017411,0x00017B9F,0x00018376,0x00018B98,0x0001940A,0x00019CD2,\
0x0001A5F5,0x0001AF78,0x0001B963,0x0001C3BB,0x0001CE88,0x0001D9D2,0x0001E5A3,0x0001F205,\
0x0001FF01,0x00020CA4,0x00021AFB,0x00022A15,0x00023A02,0x00024AD4,0x00025C9F,0x00026F7B,\
0x0002837F,0x000298CA,0x0002AF7C,0x0002C7BA,0x0002E1AE,0x0002FD8A,0x00031B84,0x00033BDF,\
0x00035EE7,0x000384F5,0x0003AE73,0x0003DBDD,0x00040DCB,0x000444F4,0x00048236,0x0004C6A6,\
0x0005139B,0x00056AC9,0x0005CE63,0x00064144,0x0006C740,0x0007658D,0x00082374,0x00090B81,\
0x000A2D7F,0x000BA246,0x000D9338,0x00104AD7,0x00145E24,0x001B28CC,0x0028BDDA,0x00517C7E };
void IQSin_Cos_Cale(p_IQSin_Cos pV)
{
uint16_t hindex;
hindex = (uint16_t) pV->IQAngle; //-32768--- 32767 +32768===0--65535
hindex >>=6; //65536/64 ===1024/4=90度=256 0x01-0xFF 0X100 0X1FF 0X200 0X2FF 0X300 0X3FF
switch (hindex & SIN_RAD) // 0X300 & 0x0000 -ff 0x0100 1ff 0X200 2ff 0x0300 3ff
{
case U0_90:
pV->IQSin = IQSin_Cos_Table[(uint8_t)(hindex)]; // 0---255 ==0---32766
pV->IQCos = IQSin_Cos_Table[(uint8_t)(0xFF-(u8)(hindex))];
break;
case U90_180:
pV->IQSin = IQSin_Cos_Table[(u8)(0xFF-(u8)(hindex))]; // 255---0 == 0---32766
pV->IQCos = -IQSin_Cos_Table[(u8)(hindex)];
break;
case U180_270:
pV->IQSin = -IQSin_Cos_Table[(u8)(hindex)];
pV->IQCos = -IQSin_Cos_Table[(u8)(0xFF-(u8)(hindex))];
break;
case U270_360:
pV->IQSin= -IQSin_Cos_Table[(u8)(0xFF-(u8)(hindex))];
pV->IQCos = IQSin_Cos_Table[(u8)(hindex)];
break;
default:
break;
}
}
//该函数的作用是将输入值限制在指定的范围内,如果超出范围则将其限制在范围边界值上
int32_t IQsat( int32_t Uint,int32_t U_max, int32_t U_min)
{
int32_t Uout;
if(Uint<= U_min)
Uout= U_min;
else if( Uint>=U_max)
Uout=U_max;
else
Uout= Uint;
return Uout;
}
//计算反正切值
void IQAtan_Cale(p_IQAtan pV)
{
int16_t i=0;
if( pV->Alpha == 0)
{
if (pV->Beta==0)
i =0;
else
i =255;
}
else
{
pV->IQTan = _IQdiv(Abs(pV->Beta),Abs(pV->Alpha));
if (IQAtan2_Table[i + 128] <= pV->IQTan) i += 128;
if (IQAtan2_Table[i + 64] <= pV->IQTan) i += 64;
if (IQAtan2_Table[i + 32] <= pV->IQTan) i += 32;
if (IQAtan2_Table[i + 16] <= pV->IQTan) i += 16;
if (IQAtan2_Table[i + 8] <= pV->IQTan) i += 8;
if (IQAtan2_Table[i + 4] <= pV->IQTan) i += 4;
if (IQAtan2_Table[i + 2] <= pV->IQTan) i += 2;
if (IQAtan2_Table[i + 1] <= pV->IQTan) i += 1;
}
if ( pV->Beta> 0)
{
if (pV->Alpha >0)
pV->IQAngle =i ;
else
pV->IQAngle= 512 -i;
}
else
{
if ( pV->Alpha >0)
pV->IQAngle= 1024-i;
else
pV->IQAngle =i+512;
}
if( pV->IQAngle<0)
pV->IQAngle+=1024;
pV->IQAngle= pV->IQAngle<<6;
}
//用于计算输入值的平方根并返回结果
uint32_t IQSqrt(uint32_t M)
{
uint32_t N, i ,tmp ,ttp;
if ( M==0 )
return 0;
N=0;
tmp=(M>>30);
M<<=2;
if( tmp>1 )
{
N++;
tmp-=N;
}
for (i=15;i>0;i-- )
{
N<<=1;
tmp<<=2;
tmp+=(M>>30);
ttp=N;
ttp=(ttp<<1)+1;
M<<=2;
if( tmp>= ttp )
{
tmp-=ttp;
N++;
}
}
return N;
}IQ_math.h
#ifndef _IQ_math_H
#define _IQ_math_H
#include "stm32f10x.h"
//共256个数
#define Abs(A) ((A>=0)?A:-A) // 绝对值函数
#define Min(A,B) ((A<=B)?A:B) // 求最小函数
#define Max(A,B) ((A>=B)?A:B) // 求最大函数
#define _IQ15(A) (int32_t)((A)<<15) //左移15位 32768
#define _IQ(A) _IQ15(A) //定义IQ格式 32768
#define _IQmpy(A,B) (int32_t)((A*B)>>15) //IQ格式相乘
#define _IQ10mpy(A,B) (int32_t)((A*B)>>10) //IQ10格式相乘
#define _IQdiv2(A) (int32_t)((A)>>1) //除2
#define _IQmpy2(A) (int32_t)(A<<1) //乘2
#define _IQdiv(A,B) (int32_t)((A<<15)/B) //IQ格式相除
#define SIN_RAD 0x0300
#define U0_90 0x0000
#define U90_180 0x0100
#define U180_270 0x0200
#define U270_360 0x0300
typedef struct {
int32_t IQAngle; // 电机磁极位置角度0---65536即是0---360度
int32_t IQSin; // IQ格式正弦参数,-32768---32767 -1到1
int32_t IQCos; // IQ格式余弦参数,-32768---32767 -1到1
} IQSin_Cos , *p_IQSin_Cos;
#define IQSin_Cos_DEFAULTS { 0,0,0} // 初始化参数
typedef struct {
int32_t Alpha; //二相静止坐标系 Alpha 轴
int32_t Beta; //二相静止坐标系 Beta 轴
int32_t IQTan; //IQ格式正切 45度正切是1,IQ的格式是
int32_t IQAngle; //IQ格式角度值 0---65536 == 0---360度
int32_t JZIQAngle; //矫正IQ格式角度值
} IQAtan , *p_IQAtan;
#define IQAtan_DEFAULTS {0,0,0,0,0} // 初始化参数
uint32_t IQSqrt(uint32_t M); // 开方函数
void IQSin_Cos_Cale(p_IQSin_Cos pV); //求取正余弦函数
void IQAtan_Cale(p_IQAtan pV) ; //求取求反正切函数
int32_t IQsat( int32_t Uint,int32_t U_max, int32_t U_min); //限制赋值函数
#endif /* __IQ_math_H */